
言語


























GLY-100コンピューター制御光ケーブル引張試験機
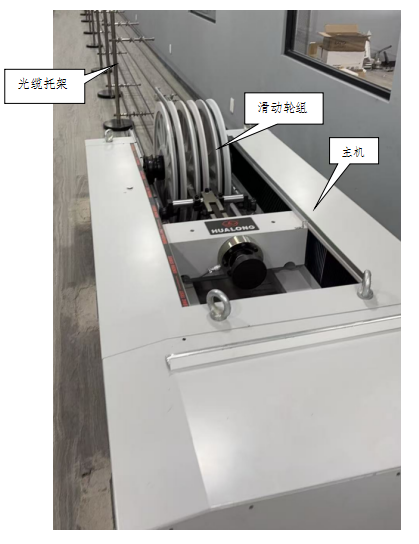
機器は、ホスト、固定ホイールグループ、スライディングホイールグループ、光ケーブルブラケット、光ケーブルクランプ(HAVAL)、拡張計(軸)、電気制御システム、コンピューター、プリンターなどで構成されています。
ホストは水平電子試験機の構造であり、移動ビームはスライディングホイールグループに接続されています。ホストは、ベース、移動ビーム、ビーム、ガイドライトバー、高精度ボールネジ、ネジ保護カバー、手動制御ボックス、センサー、制限保護装置などで構成されています。
サーボモーター、還元剤、同期ベルト、ボールネジが駆動コンポーネントを構成します。ホストの送信原理は次のとおりです。高精度の広速度比範囲サーボドライバーは、電気制御信号を受信し、高精度の広速度レギュレーションサーボモーターを制御し、還元剤(インポート)を駆動して動作させ、その後、シンクロナスの歯ベルトを駆動して移動する梁を駆動するために同期して回転させます。移動ビームはスライディングホイールグループに接続され、光学ケーブルはスライディングホイールグループと固定ホイールグループの間に巻かれ、移動ビームは光ケーブル張力の方向に移動し、スライディングホイールグループを駆動して実験を完了します。
FRIEND LINK:






