
言語


























NDT振り子衝撃試験機

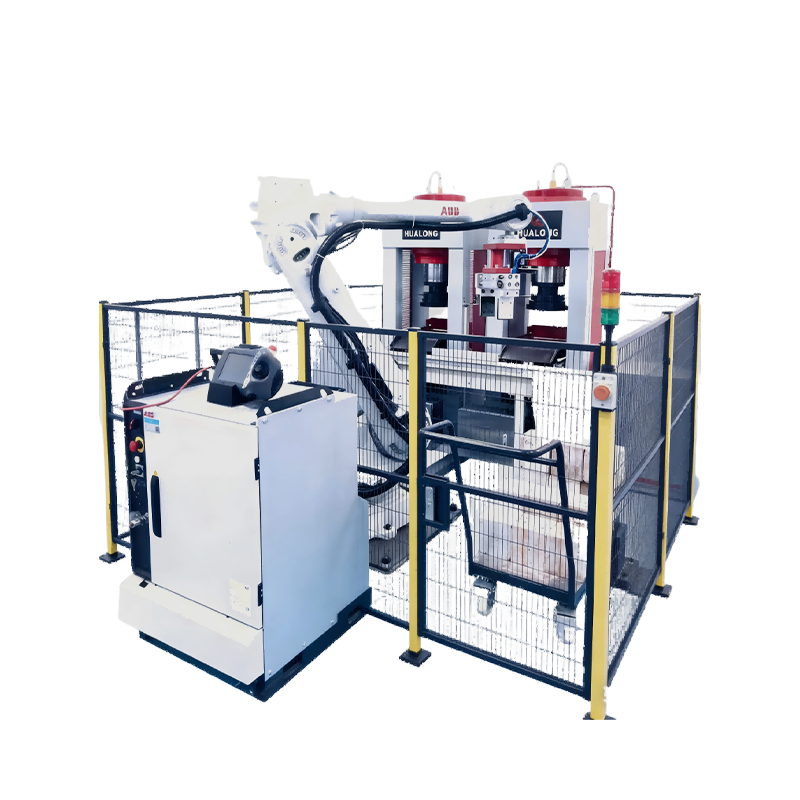
この機器は、電子制御オペレーティングシステム、低温制御システム、給餌装置とセンタリングデバイス、ホストシステム、対秒間ストライクデバイス、安全保護システムで構成されています。
1.2.1.1。電子制御オペレーティングシステム:
Man-Machineインターフェイスタッチスクリーン操作モードを採用し、最初にサンプルタイプに従ってタッチスクリーンで対応するサンプルタイプを選択し、ハンマー重量、ドロップ高さ、エネルギー、サンプル数などのさまざまなテストパラメーターを設定します。タッチスクリーンに入力するか、必要な衝撃エネルギーを直接入力します。準備ボタンを押します。この時点で、テストマシンは自動的にハンマーを設定された高さまで上げます。オペレーターは、インキュベーターから一定の温度要件に達したサンプルを取り、サンプル給餌装置に入れ、サンプルをAnvilテーブルに押し込みます。アッパー、エンドポジショニング、自動センタリング、保護ドアの閉鎖、ドロップハンマーボタンの起動、ハンマーボディが自動的に落ち、シングルピースインパクトテストを完了します。データの表示ウィンドウをテストします。衝撃が完了したら、準備ボタンを再度押します。ロックハンマーメカニズムは自動的にハンマーをつかみ、ハンマーを持ち上げます。同時に、サンプル配信デバイスを最初のデバイスに引き戻し、2番目の衝撃テストを待つことができます。自動システムが故障したときに、手動の手動操作を実行できます。機器が検査されると、メンテナンス担当者は各ユニットのアクションに対して段階的な操作を実行できます。
1.2.1.2。低温制御システム(この入札では低温システムは言及されていません)
温度制御範囲:室温〜 -80°C、温度制御精度≤0.5°C、温度勾配≤2°C。最も長い加熱時間:室温〜 -100°C <2時間。デバイスは同時に6-8 P-2サンプルを配置できます。サンプルには、冷却媒体の存在下で温度の均一性を確保するための攪拌機能があります。温度の変化は、温度制御デジタルディスプレイで直接観察されました。冷凍システムは、2段階の二重冷却とデュアルポンプスタートを使用します。一定の温度時間プロンプト機能があり、設定された一定温度時間に達すると、ピーク音が鳴ります。
1.2.1.3。給餌装置とセンタリングデバイス
Cryostatから標準サンプルを手動で取り出し、給餌装置に入れます。このデバイスはクランクアンドロッドメカニズムを採用し、手すりを押してサンプルを衝撃的なアンビルに送信します。自動的に中央に配置されており、給餌装置を採取する必要はありません。衝撃が完了した後、2番目のサンプルが配置されるのを待つために、給餌装置と廃棄物が初期位置に引き戻されます。 P-2、P-3、P-4サンプルに適しています。センタリングデバイスはアンビルに取り付けられており、サンプルの端はエラー調整のために配置されます。
1.2.1.4。ホストシステム
メインマシンは、トランスミッションメカニズム、ハンマーボディコンポーネント、リフティングメカニズム、ハンマー追跡装置、ガイドレール、ベースのフレームなどで構成されています。
a。伝送メカニズム
日本の島のブランドギア付きモーターが装備されており、パワーオフブレーキがあります。モーターがロックされ、ハンマーの上昇または下降中に突然の停電時に伝送システム全体が停止すると、ハンマーが滑りたり事故を防ぐことができます。
b。ハンマーパーツ
ハンマーボディは、鋳鉄製ピースの全体的な構造を採用し、剛性は良好で、パンチとハンマーボディが組み合わされ、高品質の合金鋼材料が使用され、硬度はHRC58-62に達し、パンチの曲率半径R25に達します。ハンマーボディの上部には、フックのセルフロック構造が備わっています。
c。持ち上げメカニズム
スプロケットチェーン送信モードを採用すると、リフティング速度は1.1m/minで、ロックハンマーをゆっくりと下げてハンマーを持ち上げます。制限制御スイッチがインストールされ、自動的に停止します。
d。持ち上げハンマー追跡デバイス
ハンマートラッキングデバイスを下げることにより、ハンマーボディとの接触後にハンマーボディが自動的にロックされ、リフティングメカニズムの作用の下で関節体がゆっくりと上がっています。設定された高さに達した後、制限コンポーネントは信号をすばやく送信して、伝送システムの回転を止め、ハンマーが設定された高さで停止します。インパクトコマンドを受信すると、ロックハンマーデバイスはハンマーボディをすばやく放出し、ガイドレールに沿って自由に移動します。インパクトテストを完了します。ロックハンマーと放出メカニズムにはセルフロックデバイスがあり、突然の停電が発生した場合、フックアンドドロップ現象は発生しません。安全で信頼性があります。
e。ガイドレール
2つのφ54×12シームレススチールチューブを備えた滑らかな表面に加工され、次にクロムメッキされています。
f。フレームフレーム
ベースはZg45鋳鉄製の材料で作られています。カラムは4つのφ83×12シームレススチールチューブを採用し、上部プレートは厚いスチールプレートでできており、剛性と強度の要件を確保しています。
1.2.1.5。反中等ストライクデバイス
ハンマーボディランディング位置のベースにそれぞれ2つの作業テーブルサーフェスが取り付けられており、プッシュ型電磁石レバーメカニズムがテーブル表面に取り付けられています。ハンマーブレードがサンプルに当たると、光電磁信号が瞬時に電磁石に送信され、レバーがプッシュされます。対秒のストライクブロックをハンマーギャップに押し込み、上向きにリバウンドし、ドロップハンマーを支え、ハンマーブレードを2回サンプルに落とさず、「二次」ストライキを効果的に防ぎます。
1.2.1.6。安全保護装置
高さ1mのスチールメッシュ保護デバイスを採用し、ドアを閉めるための電気制御デバイスが装備されています。保護ドアは閉じられておらず、オペレーティングシステムは常に閉じられており、開始できません。
1.2.1.7。データ収集システム
モーター出力シャフトは、韓国から輸入された回転エンコーダーと同軸に取り付けられています。 0.1Oの高精度と解像度は、持ち上げ位置の精度を正確に制御できます。
1.2.1.1。電子制御オペレーティングシステム:
Man-Machineインターフェイスタッチスクリーン操作モードを採用し、最初にサンプルタイプに従ってタッチスクリーンで対応するサンプルタイプを選択し、ハンマー重量、ドロップ高さ、エネルギー、サンプル数などのさまざまなテストパラメーターを設定します。タッチスクリーンに入力するか、必要な衝撃エネルギーを直接入力します。準備ボタンを押します。この時点で、テストマシンは自動的にハンマーを設定された高さまで上げます。オペレーターは、インキュベーターから一定の温度要件に達したサンプルを取り、サンプル給餌装置に入れ、サンプルをAnvilテーブルに押し込みます。アッパー、エンドポジショニング、自動センタリング、保護ドアの閉鎖、ドロップハンマーボタンの起動、ハンマーボディが自動的に落ち、シングルピースインパクトテストを完了します。データの表示ウィンドウをテストします。衝撃が完了したら、準備ボタンを再度押します。ロックハンマーメカニズムは自動的にハンマーをつかみ、ハンマーを持ち上げます。同時に、サンプル配信デバイスを最初のデバイスに引き戻し、2番目の衝撃テストを待つことができます。自動システムが故障したときに、手動の手動操作を実行できます。機器が検査されると、メンテナンス担当者は各ユニットのアクションに対して段階的な操作を実行できます。
1.2.1.2。低温制御システム(この入札では低温システムは言及されていません)
温度制御範囲:室温〜 -80°C、温度制御精度≤0.5°C、温度勾配≤2°C。最も長い加熱時間:室温〜 -100°C <2時間。デバイスは同時に6-8 P-2サンプルを配置できます。サンプルには、冷却媒体の存在下で温度の均一性を確保するための攪拌機能があります。温度の変化は、温度制御デジタルディスプレイで直接観察されました。冷凍システムは、2段階の二重冷却とデュアルポンプスタートを使用します。一定の温度時間プロンプト機能があり、設定された一定温度時間に達すると、ピーク音が鳴ります。
1.2.1.3。給餌装置とセンタリングデバイス
Cryostatから標準サンプルを手動で取り出し、給餌装置に入れます。このデバイスはクランクアンドロッドメカニズムを採用し、手すりを押してサンプルを衝撃的なアンビルに送信します。自動的に中央に配置されており、給餌装置を採取する必要はありません。衝撃が完了した後、2番目のサンプルが配置されるのを待つために、給餌装置と廃棄物が初期位置に引き戻されます。 P-2、P-3、P-4サンプルに適しています。センタリングデバイスはアンビルに取り付けられており、サンプルの端はエラー調整のために配置されます。
1.2.1.4。ホストシステム
メインマシンは、トランスミッションメカニズム、ハンマーボディコンポーネント、リフティングメカニズム、ハンマー追跡装置、ガイドレール、ベースのフレームなどで構成されています。
a。伝送メカニズム
日本の島のブランドギア付きモーターが装備されており、パワーオフブレーキがあります。モーターがロックされ、ハンマーの上昇または下降中に突然の停電時に伝送システム全体が停止すると、ハンマーが滑りたり事故を防ぐことができます。
b。ハンマーパーツ
ハンマーボディは、鋳鉄製ピースの全体的な構造を採用し、剛性は良好で、パンチとハンマーボディが組み合わされ、高品質の合金鋼材料が使用され、硬度はHRC58-62に達し、パンチの曲率半径R25に達します。ハンマーボディの上部には、フックのセルフロック構造が備わっています。
c。持ち上げメカニズム
スプロケットチェーン送信モードを採用すると、リフティング速度は1.1m/minで、ロックハンマーをゆっくりと下げてハンマーを持ち上げます。制限制御スイッチがインストールされ、自動的に停止します。
d。持ち上げハンマー追跡デバイス
ハンマートラッキングデバイスを下げることにより、ハンマーボディとの接触後にハンマーボディが自動的にロックされ、リフティングメカニズムの作用の下で関節体がゆっくりと上がっています。設定された高さに達した後、制限コンポーネントは信号をすばやく送信して、伝送システムの回転を止め、ハンマーが設定された高さで停止します。インパクトコマンドを受信すると、ロックハンマーデバイスはハンマーボディをすばやく放出し、ガイドレールに沿って自由に移動します。インパクトテストを完了します。ロックハンマーと放出メカニズムにはセルフロックデバイスがあり、突然の停電が発生した場合、フックアンドドロップ現象は発生しません。安全で信頼性があります。
e。ガイドレール
2つのφ54×12シームレススチールチューブを備えた滑らかな表面に加工され、次にクロムメッキされています。
f。フレームフレーム
ベースはZg45鋳鉄製の材料で作られています。カラムは4つのφ83×12シームレススチールチューブを採用し、上部プレートは厚いスチールプレートでできており、剛性と強度の要件を確保しています。
1.2.1.5。反中等ストライクデバイス
ハンマーボディランディング位置のベースにそれぞれ2つの作業テーブルサーフェスが取り付けられており、プッシュ型電磁石レバーメカニズムがテーブル表面に取り付けられています。ハンマーブレードがサンプルに当たると、光電磁信号が瞬時に電磁石に送信され、レバーがプッシュされます。対秒のストライクブロックをハンマーギャップに押し込み、上向きにリバウンドし、ドロップハンマーを支え、ハンマーブレードを2回サンプルに落とさず、「二次」ストライキを効果的に防ぎます。
1.2.1.6。安全保護装置
高さ1mのスチールメッシュ保護デバイスを採用し、ドアを閉めるための電気制御デバイスが装備されています。保護ドアは閉じられておらず、オペレーティングシステムは常に閉じられており、開始できません。
1.2.1.7。データ収集システム
モーター出力シャフトは、韓国から輸入された回転エンコーダーと同軸に取り付けられています。 0.1Oの高精度と解像度は、持ち上げ位置の精度を正確に制御できます。
前の:絶縁体熱エンジン試験機
次:振り子衝撃試験機



助けが必要ですか、それとも質問がありますか?
Hualongがテストを通じて会社の利益を支援する方法の詳細については、ボタンをクリックしてください。FRIEND LINK:






